Appearance
从零学习矩阵乘(GEMM)优化
基础版本
根据最基础的行列式乘法的计算方法,一个m*k的矩阵乘上k*n的矩阵得到一个m*n的矩阵。用代码表示就是一个三层的循环:
c
for(int m=0;m<M;m++){
for(int n=0;n<N;n++){
C[m][n]=0;
for(int k=0;k<K;k++){
C[m][n]+=A[m][k]*B[k][n];
}
}
}这种计算方式就有很大的性能问题,复杂度是O(mnk),且如果具备一定的硬件知识,对A和B的非连续访问会导致缓存命中率下降,从而影响性能。
二维改一维
c
/* Create macros so that the matrices are stored in column-major order */
#define A(i,j) a[ (i)*lda + (j) ]
#define B(i,j) b[ (i)*ldb + (j) ]
#define C(i,j) c[ (i)*ldc + (j) ]
/* Routine for computing C = A * B + C */
void MY_MMult( int m, int n, int k, double *a, int lda,
double *b, int ldb,
double *c, int ldc )
{
int i, j, p;
for ( i=0; i<m; i++ ){ /* Loop over the rows of C */
for ( j=0; j<n; j++ ){ /* Loop over the columns of C */
for ( p=0; p<k; p++ ){ /* Update C( i,j ) with the inner
product of the ith row of A and
the jth column of B */
C( i,j ) = C( i,j ) + A( i,p ) * B( p,j );
}
}
}
}二维矩阵改一维后,性能上并没有发生明显的提升,毕竟二维行主序转为一维后仍然是行主序(如果一维变为列主序性能反而会下降)
注意GitHub仓库中的写法是列主序,查询后发现Fortran是列主序的。但是显然对于C来说,行主序的性能更高。所以后续的讨论还是以列主序为基础。
分块
分块的主要优化逻辑是,尽可能的利用计算单元
1x4
尝试在一个循环内执行四次运算
c
for ( j=0; j<n; j+=4 ){ /* Loop over the columns of C, unrolled by 4 */
for ( i=0; i<m; i+=1 ){ /* Loop over the rows of C */
/* Update the C( i,j ) with the inner product of the ith row of A
and the jth column of B */
AddDot( k, &A( i,0 ), lda, &B( 0,j ), &C( i,j ) );
/* Update the C( i,j+1 ) with the inner product of the ith row of A
and the (j+1)th column of B */
AddDot( k, &A( i,0 ), lda, &B( 0,j+1 ), &C( i,j+1 ) );
/* Update the C( i,j+2 ) with the inner product of the ith row of A
and the (j+2)th column of B */
AddDot( k, &A( i,0 ), lda, &B( 0,j+2 ), &C( i,j+2 ) );
/* Update the C( i,j+3 ) with the inner product of the ith row of A
and the (j+1)th column of B */
AddDot( k, &A( i,0 ), lda, &B( 0,j+3 ), &C( i,j+3 ) );
}
}根据测试结果,性能在更高维矩阵中表现更佳
后续有很多形式上的优化,比如将AddDot改写为AddDot1x4,但本质上都是同时计算4列C的值,所以性能上没有区别。
一个阶段性的版本如下:
c
/* Create macros so that the matrices are stored in column-major order */
#define A(i,j) a[ (j)*lda + (i) ]
#define B(i,j) b[ (j)*ldb + (i) ]
#define C(i,j) c[ (j)*ldc + (i) ]
/* Routine for computing C = A * B + C */
void AddDot1x4( int, double *, int, double *, int, double *, int )
void MY_MMult( int m, int n, int k, double *a, int lda,
double *b, int ldb,
double *c, int ldc )
{
int i, j;
for ( j=0; j<n; j+=4 ){ /* Loop over the columns of C, unrolled by 4 */
for ( i=0; i<m; i+=1 ){ /* Loop over the rows of C */
/* Update C( i,j ), C( i,j+1 ), C( i,j+2 ), and C( i,j+3 ) in
one routine (four inner products) */
AddDot1x4( k, &A( i,0 ), lda, &B( 0,j ), ldb, &C( i,j ), ldc );
}
}
}
void AddDot1x4( int k, double *a, int lda, double *b, int ldb, double *c, int ldc )
{
/* So, this routine computes four elements of C:
C( 0, 0 ), C( 0, 1 ), C( 0, 2 ), C( 0, 3 ).
Notice that this routine is called with c = C( i, j ) in the
previous routine, so these are actually the elements
C( i, j ), C( i, j+1 ), C( i, j+2 ), C( i, j+3 )
in the original matrix C.
In this version, we merge the four loops, computing four inner
products simultaneously. */
int p;
// AddDot( k, &A( 0, 0 ), lda, &B( 0, 0 ), &C( 0, 0 ) );
// AddDot( k, &A( 0, 0 ), lda, &B( 0, 1 ), &C( 0, 1 ) );
// AddDot( k, &A( 0, 0 ), lda, &B( 0, 2 ), &C( 0, 2 ) );
// AddDot( k, &A( 0, 0 ), lda, &B( 0, 3 ), &C( 0, 3 ) );
for ( p=0; p<k; p++ ){
C( 0, 0 ) += A( 0, p ) * B( p, 0 );
C( 0, 1 ) += A( 0, p ) * B( p, 1 );
C( 0, 2 ) += A( 0, p ) * B( p, 2 );
C( 0, 3 ) += A( 0, p ) * B( p, 3 );
}
}插曲:一些细节优化
从上面的代码中,可以发现
- 对C的累加过程可以用寄存器来替代,最后再写回C中
- 计算核中A是不变的,也可以用寄存器来优化访问
- B的访问也可以用寄存器优化
如果都用寄存器优化对C,A,B的访问,那么需要4+1+4个寄存器。因为是用一维数组来存储矩阵,宏定义中每次访问都要进行计算,这里优化掉的是重复计算这部分。可以得到下面的代码:
c
void AddDot1x4( int k, double *a, int lda, double *b, int ldb, double *c, int ldc )
{
/* So, this routine computes four elements of C:
C( 0, 0 ), C( 0, 1 ), C( 0, 2 ), C( 0, 3 ).
Notice that this routine is called with c = C( i, j ) in the
previous routine, so these are actually the elements
C( i, j ), C( i, j+1 ), C( i, j+2 ), C( i, j+3 )
in the original matrix C.
In this version, we use pointer to track where in four columns of B we are */
int p;
register double
/* hold contributions to
C( 0, 0 ), C( 0, 1 ), C( 0, 2 ), C( 0, 3 ) */
c_00_reg, c_01_reg, c_02_reg, c_03_reg,
/* holds A( 0, p ) */
a_0p_reg;
double
/* Point to the current elements in the four columns of B */
*bp0_pntr, *bp1_pntr, *bp2_pntr, *bp3_pntr;
bp0_pntr = &B( 0, 0 );
bp1_pntr = &B( 0, 1 );
bp2_pntr = &B( 0, 2 );
bp3_pntr = &B( 0, 3 );
c_00_reg = 0.0;
c_01_reg = 0.0;
c_02_reg = 0.0;
c_03_reg = 0.0;
for ( p=0; p<k; p++ ){
a_0p_reg = A( 0, p );
c_00_reg += a_0p_reg * *bp0_pntr++;
c_01_reg += a_0p_reg * *bp1_pntr++;
c_02_reg += a_0p_reg * *bp2_pntr++;
c_03_reg += a_0p_reg * *bp3_pntr++;
}
C( 0, 0 ) += c_00_reg;
C( 0, 1 ) += c_01_reg;
C( 0, 2 ) += c_02_reg;
C( 0, 3 ) += c_03_reg;
}测试结果中,FLOPS明显变高。
4x4
在进行4x4的分块前,需要思考:为什么1x4的分块会有性能提升?
比较原始版本和在1x4的分块中的计算核:
c
for ( i=0; i<m; i++ ){ /* Loop over the rows of C */
for ( j=0; j<n; j++ ){ /* Loop over the columns of C */
for ( p=0; p<k; p++ ){ /* Update C( i,j ) with the inner
product of the ith row of A and
the jth column of B */
C( i,j ) = C( i,j ) + A( i,p ) * B( p,j );
}
}
}c
for (int i=0; i<m; i++){
for (int j=0; j<n; j+=4){
for (int p=0; p<k; p++){
C( i,j ) += A( i,p ) * B( p,j );
C( i,j+1 ) += A( i,p ) * B( p,j+1 );
C( i,j+2 ) += A( i,p ) * B( p,j+2 );
C( i,j+3 ) += A( i,p ) * B( p,j+3 );
}
}
}在知乎的原文中的图很形象,一个计算核中用到了A的一行和B的四列。
未分块时,每个循环都会load A和B的值,且C的值在循环过程中是累加的,如果编译器“聪明”的话,会在寄存器中把C的值计算完毕后再写回,但是如果不“聪明”的话,累加一次就要写回一次。
分块后,一个循环内,A只用读取一次了,但是可以参与4个不同的B的计算,这样一下就把A的访存次数减少了3/4,因此性能的提升实际上是减少了对A的访存。
那么,既然可以减少对A的访存,那可不可以减少对B的访存?这样1x4的分块就可以改进成4x4的分块。
c
for (int i=0; i<m; i+=4){
for (int j=0; j<n; j+=4){
for (int p=0; p<k; p++){
C( i,j ) += A( i,p ) * B( p,j );
C( i,j+1 ) += A( i,p ) * B( p,j+1 );
C( i,j+2 ) += A( i,p ) * B( p,j+2 );
C( i,j+3 ) += A( i,p ) * B( p,j+3 );
C( i+1,j ) += A( i+1,p ) * B( p,j );
C( i+1,j+1 ) += A( i+1,p ) * B( p,j+1 );
C( i+1,j+2 ) += A( i+1,p ) * B( p,j+2 );
C( i+1,j+3 ) += A( i+1,p ) * B( p,j+3 );
C( i+2,j ) += A( i+2,p ) * B( p,j );
C( i+2,j+1 ) += A( i+2,p ) * B( p,j+1 );
C( i+2,j+2 ) += A( i+2,p ) * B( p,j+2 );
C( i+2,j+3 ) += A( i+2,p ) * B( p,j+3 );
C( i+3,j ) += A( i+3,p ) * B( p,j );
C( i+3,j+1 ) += A( i+3,p ) * B( p,j+1 );
C( i+3,j+2 ) += A( i+3,p ) * B( p,j+2 );
C( i+3,j+3 ) += A( i+3,p ) * B( p,j+3 );
}
}
}上面的这个展开就十分的复杂,要手动展开4x4=16次。但是A的访存次数和B的访存次数都减少了3/4,虽然C还是需要访存16次...
到这里,自然而然的发现,最外层的两个循环的step都变成了4,那么内层的k的循环是不是也可以再继续展开?显然是可以的,只不过就要写64次了:
c
C[i:i+3,j:j+3]+=A[i:i+3,k:k+4]*B[k:k+4,j:j+4]但是展开k层也是对访存进行的优化吗?通过展开m和n,其实已经缓存了A和B的访存,而C的访存和k无关,所以k层的展开在访存上是无优化的,如果有优化效果,也是指令流层面的优化。
分块的优化效果
那么4x4优化的访存效果如何?可以计算一下:
原始的计算中,计算数是MNK,这个是优化不了的。访存数计算为,每次循环要读取A和B,读写C,所以总访存数是4MNK。
进行4x4分块后,对A和B的访存数降为了之前的1/4,对C的访存数没有改变,所以总的访存数变成了2+1/4+1/4=2.5MNK。比之前的4MNK性能提高了1.6x。
使用寄存器优化对C的访存,在累加结束后一次写回,那么在k层循环内完全消除了C的访存,C的访存次数变成了MN(只有一次写入)。此时的总的访存次数就是MN+1/4MNK+1/4MNK,K足够大时,总访存次数可认为是1/2MKN,这样就相对于最初有了8x的提高。
SIMD
回顾上面的优化方案,归纳来看实际上只有一个点,就是优化访存。做分块是优化访存,使用寄存器做累加器也是优化访存。但是实际上矩阵运算都是用simd指令来优化的。也就是计算也可以进行优化。
这部分知乎上的图绘制的很清晰,只需要补充一些基础知识,以符合”从零开始“这个主题。
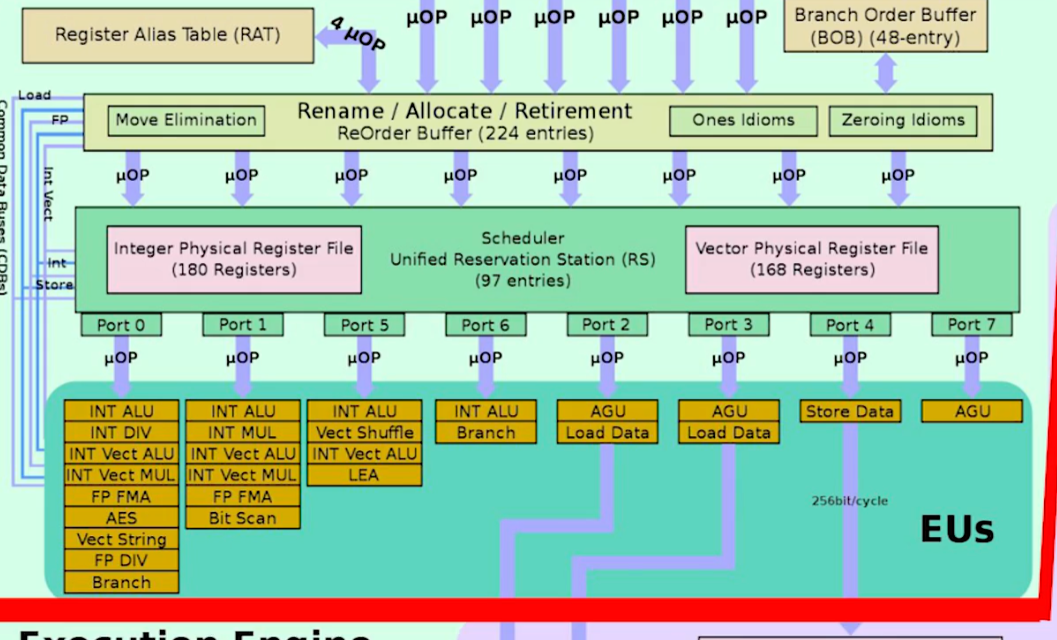
SIMD有专门的指令集和寄存器和计算单元。寄存器可以放入远超普通寄存器的位数。比如avx-512就可以放入512位数据。有了存还要有专门的计算单元,这块其实比较复杂,如果不是专门研究CPU的比较难理解。最主要的是做乘加运算的FMA单元,也有非乘加的,用于逻辑运算的vector ALU,用于向量乘的vector MUL,用于重排数据的vector shuffle。这些专门的计算单元可以在一个周期内完成一次向量计算。对于上面的例子来说,实现了1x4的展开后,向量计算单元可以同时计算4次乘法(1次向量乘),这样计算的时间就缩短到了1/4。
卷积和矩阵乘
卷积作为数学概念,我反正是不太容易理解的,但是卷积神经网络的概念,由于AI的发展,且更贴近应用层,就比较朴实易懂。
在卷积神经网络中,卷积操作是指将一个可移动的小窗口(称为数据窗口)与图像进行逐元素相乘然后相加的操作。这个小窗口其实是一组固定的权重,它可以被看作是一个特定的滤波器(filter)或卷积核。这个操作的名称“卷积”,源自于这种元素级相乘和求和的过程。这一操作是卷积神经网络名字的来源。
其实我个人的理解就是,卷积的操作可以提取出元素的空间关系,因此CNN也就常用于图像这种有多个维度的模型构建上。